
简单概述:同一型号产品可能有多个版本,不同版本的产品会存在差异(包括功能参数、LOGO设计、外观细节、产品资料等),请以实物为准。建议您在购买前就您将要购买的具体版本进行详细咨询。
通过独立定心插入和移除时的公差补偿
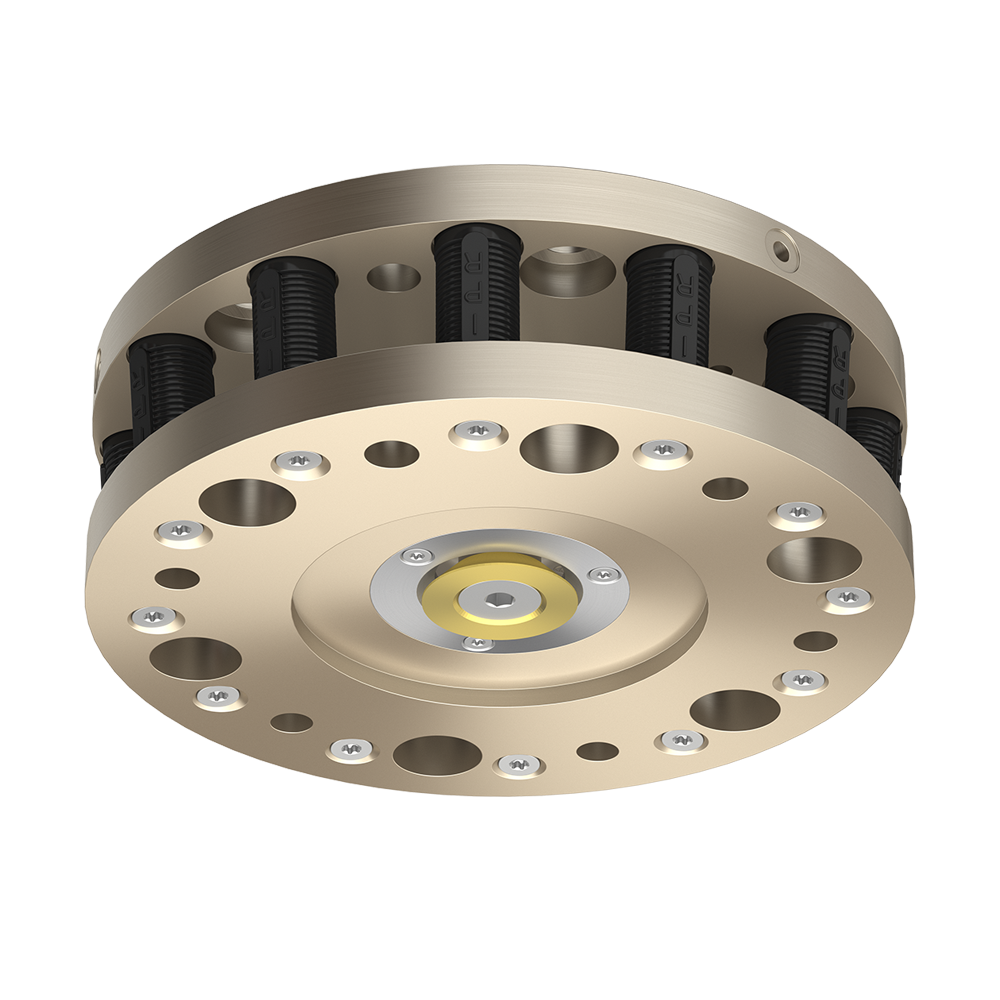
描述
八种尺寸的连接机构,带有可选的过载保护、气缸和/或防扭曲装置
特点
• 防止工件倾斜和卡住
• 通过最小化接合力和扭矩来保护机器人和装配结构免于过早磨损
• 最小化循环时间
• 提供多达四种不同的版本
工作
原理 专门开发的弹性体元件可实现位置补偿。如果存在位置偏移,待接合的工件将通过反作用力自动移动,从而防止接合伙伴卡住和倾斜。最大补偿运动由连接伙伴上的插入斜面尺寸和弹性体元件的最大补偿运动决定。补偿运动在 XY 平面中水平发生,在角度补偿的情况下,围绕 X、Y 或 Z 轴径向运动。偏转后,元件通过自定心返回到其原始位置。